
Anfang der 1980er Jahre nehmen zwei Studenten der Universität Bologna, Pierluigi Marconi und Roberto Ugolini, Kontakt zu Bimota auf, um über zukünftige Entwicklungen im Motorradbau zu sprechen. Sie sind auf der Suche nach einem geeigneten Thema für ihre Diplomarbeit (ital. Tesi). Bimota hatte sich zu der Zeit mit seinen exzellenten Fahrwerks-Konstruktionen einen hervorragenden Ruf erarbeitet. Leichte, steife Rahmen und Schwingen sind die Kernkompetenzen der Firma. Bei der Wahl der Gabeln setzt man keine eigenen Produkte ein, sondern kauft hochwertige Teleskop-Gabeln bekannter Hersteller wie Ceriani oder Marzzochi zu.
Veröffentlicht unter Patent EP 0 432 107 B1
Die vordere Gabel übernimmt im Chassis des Motorrades eine Reihe von Funktionen:
– Vorderrad führen
– Lenkbewegung übertragen
– Vorderrad federn und dämpfen
– Kräfte in den Rahmen übertragen
Die Teleskopgabeln jener Zeit waren aus Tamburinis Sicht die Schwachstelle des Chassis und kamen nicht nur im Rennsport an ihre Grenzen. Vor allem beim Bremsen verursachen die auftretenden Kräfte und die damit einhergehende Verwindung der Gabel ein schlechteres Ansprechverhalten von Federung und Dämpfung. Zusätzlich verändert sich beim Eintauchen der Gabel die Fahrwerksgeometrie und durch die langen Hebelarme der Gabel sind die in den Steuerkopf eingeleiteten Kräfte sehr hoch. Grund genug nach Alternativen zu suchen. Damit ist das Thema für die Arbeit gefunden – die Konstruktion einer optimierten Vorderradführung.
Marconi und Ugolini entwickeln eine konstruktive Lösung, bei der das Vorderrad mit einer Zweiarmschwinge und Radnabenlenkung geführt wird. Der Einsatz einer Radnabenlenkung für Motorräder ist allerdings nicht neu. Sie wurde bereits Anfang der 1920er Jahren vom deutschstämmigen Amerikaner Carl A. Neracher entwickelt. Die Neracar Corporation of Syracuse produzierte mit dem „Ner-a-car“ genannten Modell das erste in Serie gebaute Motorrad mit Radnabenlenkung. Die Konstruktion von Marconi und Ugolini nutzt zwar das Prinzip der Lenkung, hat aber ansonsten wenig mit der Lösung von Neracher gemeinsam.
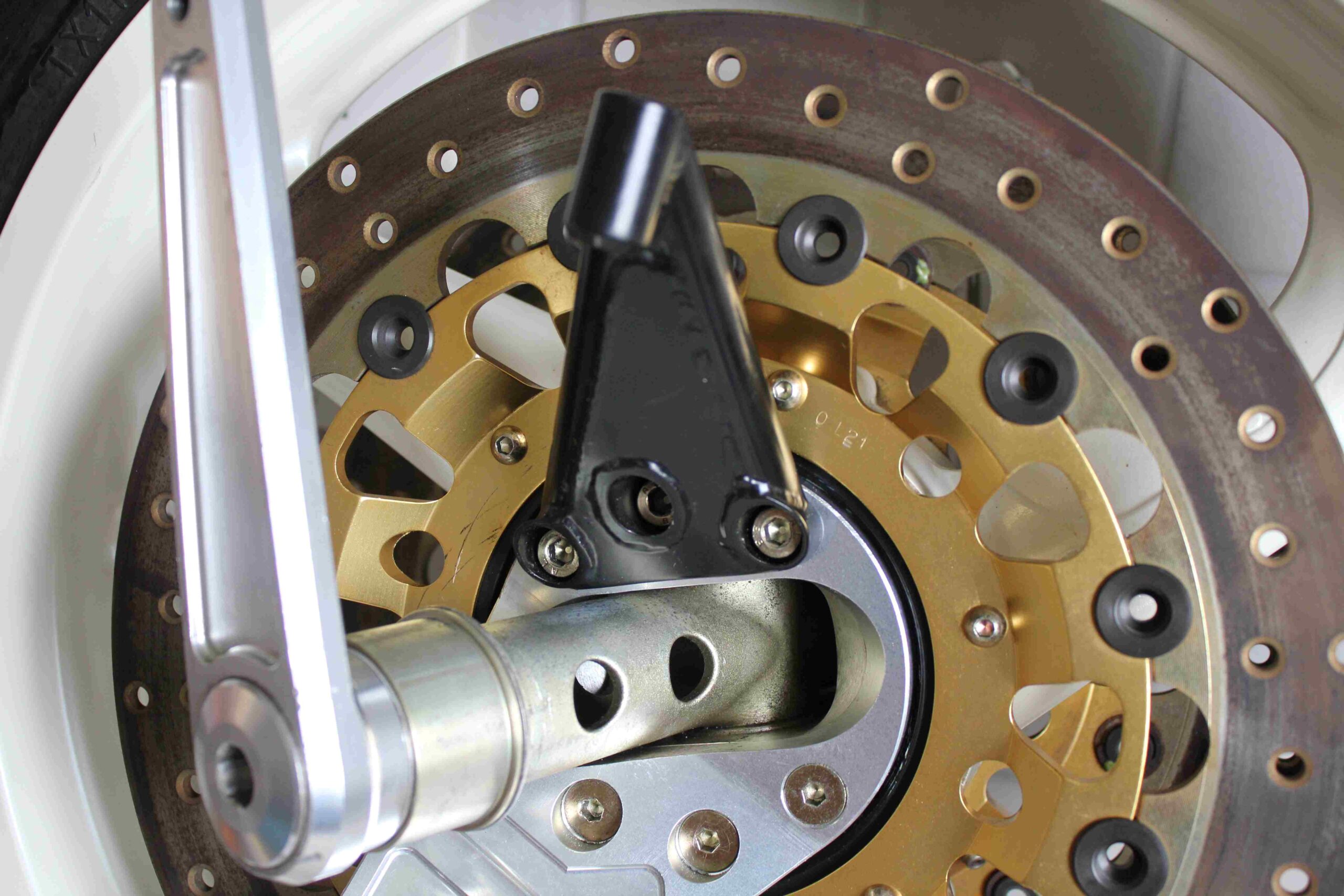
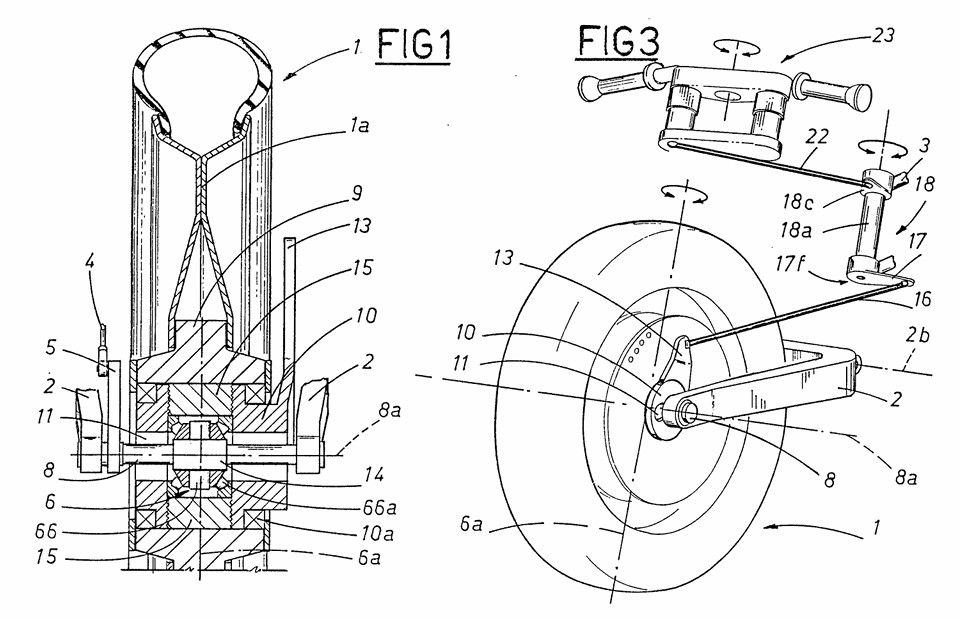
Der Kern der Radnabenlenkung ist das Kreuzstück in der Nabe. Um die eine Achse (Achszapfen) rotiert das Rad, um die andere (Lenkzapfen) wird gelenkt. Der Hebel, mit dem gelenkt wird, ist mit dem feststehenden inneren Teil der Radnabe verbunden. Die Lager der Nabe haben einen deutlich größeren Durchmesser als üblich.
Die Radnabenlenkung bietet den konstruktiven Vorteil die genannten Funktionen der Vorderradführung weitgehend zu entkoppeln. Außerdem bleibt beim Federn der Nachlauf nahezu konstant. Sie hat aber auch prinzipbedingte Nachteile. Neben einem reduzierten Lenkeinschlag, der durch die Geometrie der Schwinge begrenzt ist, sind die deutlich höheren Kosten eine Hürde.
Für Bimota machte es absolut Sinn auf eine System zu setzen, bei dem die Vorteile der getrennten Funktionen von Federung, Radführung und Übertragung der Bremskräfte mit dem Preis der höheren Kosten und des geringen Lenkeinschlags erkauft werden. Beide Nachteile sind bei Bimotas Rennsportaktivitäten als auch bei den ohnehin hochpreisigen Kundenmodellen eher zweitrangig.
Nach Abschluss der Diplomarbeit stellt Bimota Pierluigi Marconi und Roberto Ugolini ein. Auf Basis ihrer Arbeit bauen sie unter der Leitung von Frederico Martini, Tamburini hatte das Unternehmen im gleichen Jahr verlassen, einen Prototypen, der Ende 1983 auf der Mailänder Motorradmesse präsentiert wird.

Foto zur Verfügung gestellt von Dietmar Edel, Hadamar
Für den ersten Prototypen, der 1983 auf der Mailänder Motorradmesse präsentiert wird, dient der Motor der Honda VF 400 als Basis. Der 90° V4 DOHC Vierventil- Motor baut schmal und kompakt. Die Bauform des Motors eignet sich optimal, da bereits der Prototyp über keinen konventionellen Rahmen verfügt. Die Verbindung zwischen den beiden Schwingen bildet ein am Motor verschraubtes Bauteil mit einen Materialmix aus Aluminium, Kohlefaser und Kevlar, das gleichzeitig als Verkleidungsunterteil dient. Das Federbein für die vordere Schwinge liegt unter dem Motor und wird über Hebel angebunden.

Foto zur Verfügung gestellt von Dietmar Edel, Hadamar
Für die Übertragung der Lenkbewegung geben die Entwickler der hydraulischen Lösung den Vorzug gegenüber einer mechanische Anbindung. Wie man an den späteren Serienmodellen sehen kann ist die mechanische Lösung komplex und potentiell mit Spiel behaftet. Die hydraulische Lösung beim Tesi Prototypen ist recht einfach. Sowohl am Steuerkopf als auch am Vorderrad sind beidseitig wirkende Zylinder verbaut. In späteren Prototypen wird diese Lösung wegen der schlechten Rückmeldung der Lenkkräfte zum Fahrer wieder verworfen.
In Jahr später, 1984, entsteht der 2. Prototyp mit dem Honda VF 750 Motor zur Erprobung auf der Rennstrecke. Bimota entwickelt hierfür einen zweiteiligen Hybridrahmen aus Carbonfaser und Aluminium, der seitlich am Motor verschraubt ist. Die Radnabenlenkung wird modifiziert, um vorne eine zweite Bremsscheibe auf der rechten Seite, dort wo sich der Lenkhebel befindet, montieren zu können. Die Übertragung der Lenkbewegung erfolgt auch hier hydraulisch.

Foto zur Verfügung gestellt von Dietmar Edel, Hadamar
1985 präsentiert Bimota den dritten Prototypen, wieder mit dem Motor der Honda VF 750 aber einem komplett neuen Rahmen. Die Verbundrahmen aus Kohlefaser der ersten Prototypen erweisen sich als zu teuer für eine Serienproduktion. Bimota setzt daher auf herkömmliche Materialien und baut den Rahmen aus einem Mix aus gefrästen Aluminiumplatten und Stahlrohr. Auf jeder Seite des Motors sind zwei Aluminiumplatten, eine zur Aufnahme der vorderen und eine für die hintere Schwinge, verschraubt. Die Verbindung der seitlichen Platten erfolgt durch zwei 35 mm Stahlrohre. Das Rahmenheck und der Vorderrahmen sind ebenfalls aus Stahlrohr gefertigt.

Foto zur Verfügung gestellt von Dietmar Edel, Hadamar
Zwei weiter Jahre vergehen bis zum nächsten Prototypen, der einen großen Schritt Richtung Serientauglichkeit markiert. Zum einen wird die hydraulische Lenkung gegen eine mechanische ersetzt, zum anderen wird der Rahmen extrem vereinfacht, da der Motor als tragendes Element genutzt wird. Als Antrieb dient der Vierzylinder Reihenmotor der Yamaha FZ 750, an dem auf jeder Seite zwei aus dem vollen gefräste Aluminiumplatten, eine zur Lagerung der vorderen und eine für die hintere Schwinge, verschraubt sind. Durch die tragende Funktion des Motors sind keine verbindenden Rahmenrohre notwendig. An den Aluminiumplatten sind der vordere und hintere Hilfsrahmen für Steuerkopf, Tank und Monocoque verschraubt.

Foto zur Verfügung gestellt von Dietmar Edel, Hadamar
1988 präsentiert Bimota den fünften und damit letzten Prototypen, dessen Antrieb und Fahrwerk bereits den Stand der späteren Serienversion zeigen. Diese Tesi besitzt auch keinen klassischen Rahmen, sondern lediglich zwei gefräste 35 mm starke Aluminiumplatten, die seitlich, an jeweils vier Punkten, am 851er Ducati Motor verschraubt sind und die vordere Schwinge, den vorderen und hinteren Hilfsrahmen, die Anbindung des vorderen Federbeins und die Lenkmechanik aufnehmen.
1989 nimmt Bimota mit dem fünften Tesi Prototypen am Lauf der Italienischen Meisterschaft in Misano in der TT-Formel 1 Klasse teil und erreicht einen hervorragenden zweiten Platz hinter einer Honda RC 30. Damit beweist die Tesi eindrucksvoll ihr Potenzial.
Fast 10 Jahre vergehen von der Idee bis zur Serienproduktion der Tesi 1D. Dies macht deutlich, wieviel Aufwand die Realisierung für die kleine Motorradmanufaktur bedeutet. Aber die Beharrlichkeit zahlt sich aus. Bimota gelingt damit eine weitere Innovation und ein Meilenstein in der Motorradgeschichte.
Das Konzept der Radnabenlenkung führt Bimota in den 2000er Jahren mit der Tesi 3D weiter. Auch das erste Modell in der Zusammenarbeit mit Kawasaki ist wieder eine Tesi. Die 2023 präsentierten Tera markiert mit der Übertragung der Lenkbewegung über die Bremssättel die bis dahin letzte Entwicklungsstufe.

Offizielles Pressefoto zur Verfügung gestellt auf bimota.it